The complete Arduino Sketch for DFRobot Romeo motors, servo, LEDs, sound, and obstacle sensors
The beauty about DFRobot Romeo V2 is its completeness. The code exposes the board’s capabilities to: Travel (forward, reverse, left, right, forward left, forward right, reverse left, reverse left) Blink LEDs ‘Sing’ songs through buzzer Detect obstacles and respond to it Tilt web cam servo Response to buttons and Read…
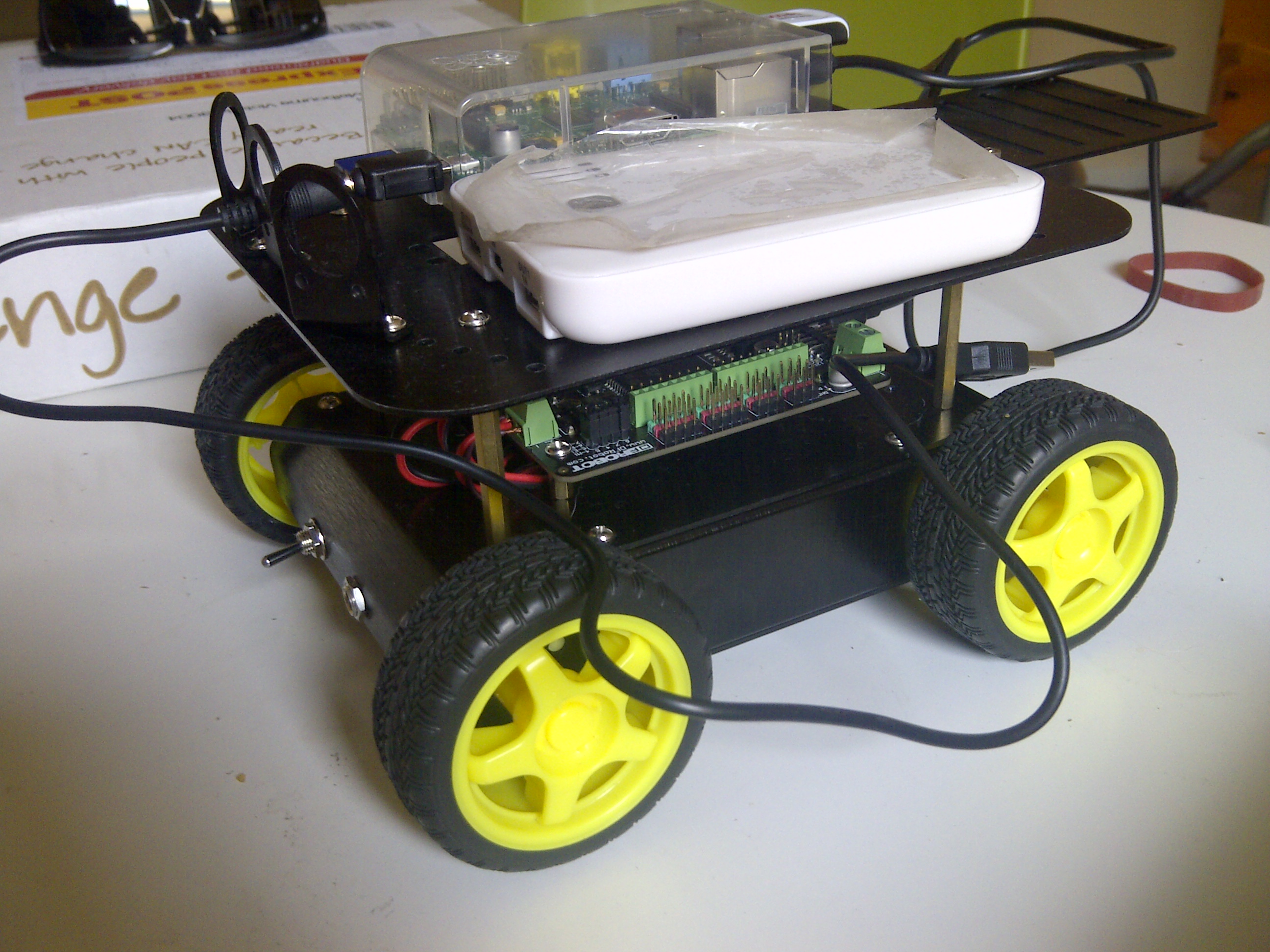
Bar Camp Melbourne 2013: Raspbery Internet Rover presentation #bcm2013
The Bar Camp Melbourne was held on 16/3/13 in Cause Way House, Lt Collins St, Melbourne. The audience got so excited, they took-over control via their iPhones and Androids. The robot got crazy taking commands from 5 different people. Slide show from the Workshop can be found here: Raspberry Internet…
Raspberry Internet Rover Part 3 – NodeJS server
Install socket.io by typing: npm install socket.io Install zeparser: npm install zeparser , then copy paste this instruction below: var fs, http, io, server, net; fs = require(‘fs’); http = require(‘http’); net = require(‘net’); var light1 = true; var light2 = true; server = http.createServer(function(req, res) { return fs.readFile(“” +…
Controlling Arduino Motors via Raspberry-Hosted Website (Part 2)
We want to send commands to our remote-control Arduino car. One way to communicate directly with Arduino from Python is through Serial interface. For this we need a Python library called pySerial, which allows direct signal manipulation via serial ports. Installation PySerial is available as a standard Debian package. sudo apt-get install python-serial…
")

