
Robot Project Day 3 – Gertboard
Previous: Day 2 – Raspberry Pi The Gertboard bottom socket goes into Raspberry GPIO headers. Please upload a test programs into its ATMega pins. There are a lot of tutorials about this, or you can also refer to Gertboard User Manual. Go to Gertboard ATMega Pin Setup for a proper…
Robot Project Day 2 – Raspberry Pi
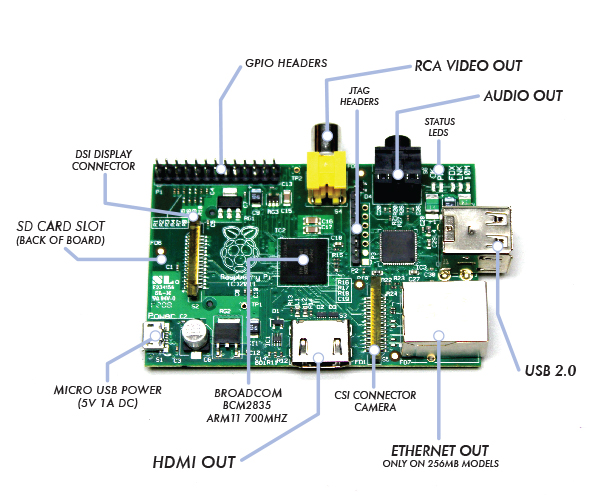
Previous: Day 1 – Chassis and Motors The Pi is essential as the heart and brain of the robot. This with the help of Gertboard which turns the Pi into an Arduino compatible device, is crucial for sending commands to the motors and servos. The Pi runs Raspbian with an…
Robot Project Day 4 – Motor Controller
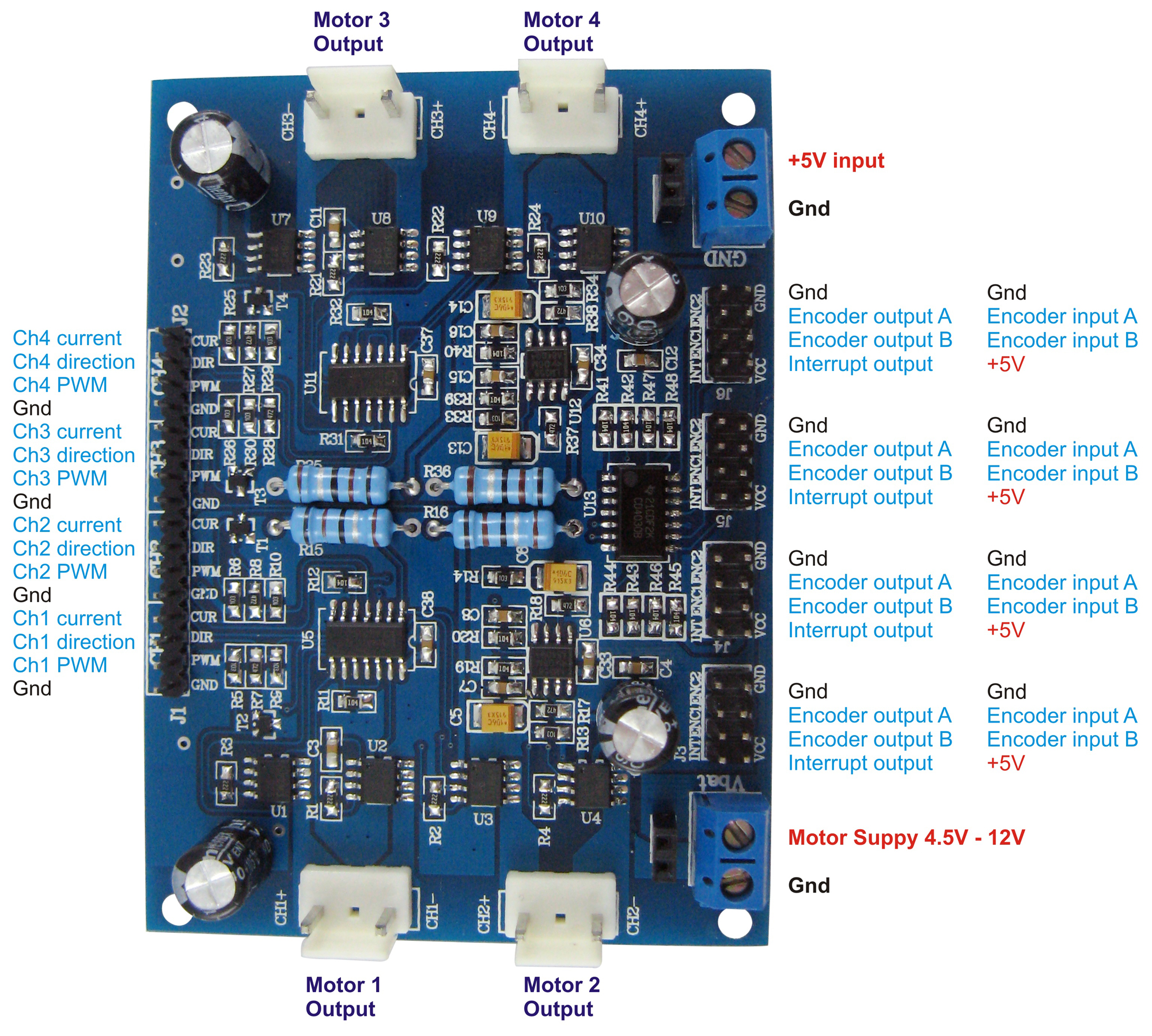
Previous: Day 3 – Gertboard Setup Configuring Motor Controller At LinuxCircle we are happy with Dagu 4-Channel Motor Controller Board. Connect each motor to its corresponding motor ouput. Prepare 8 jumper wires for the micro controller pins to be connected to your Gertboard and 4 jumper wires to your current supply pins….

Robot Project Day 1 – Chassis & motors
Previous: Day 0 – Procurement & Preparation Chassis Theare are a few off-the-shelf solutions to assemble the chassis and motors. Key points to consider includes: 4WD vs 2WD If you have 4 separate motors you can consider to have 4-channel motor controller which makes it a pure all wheel drive, or if you…

Servo Manual Control Without Arduino Servo Library on Raspberry Pi and Gertboard
Arduino Servo library Servo.h despite its simplicity often creates timer conflicts with other PWM pins. In our lab experiment, we found that when we attach servo on Pin 11, PWM capability on at least one of the other pins gets disabled, e.g. the right wheel of the rover attached to Pin 3…
")

