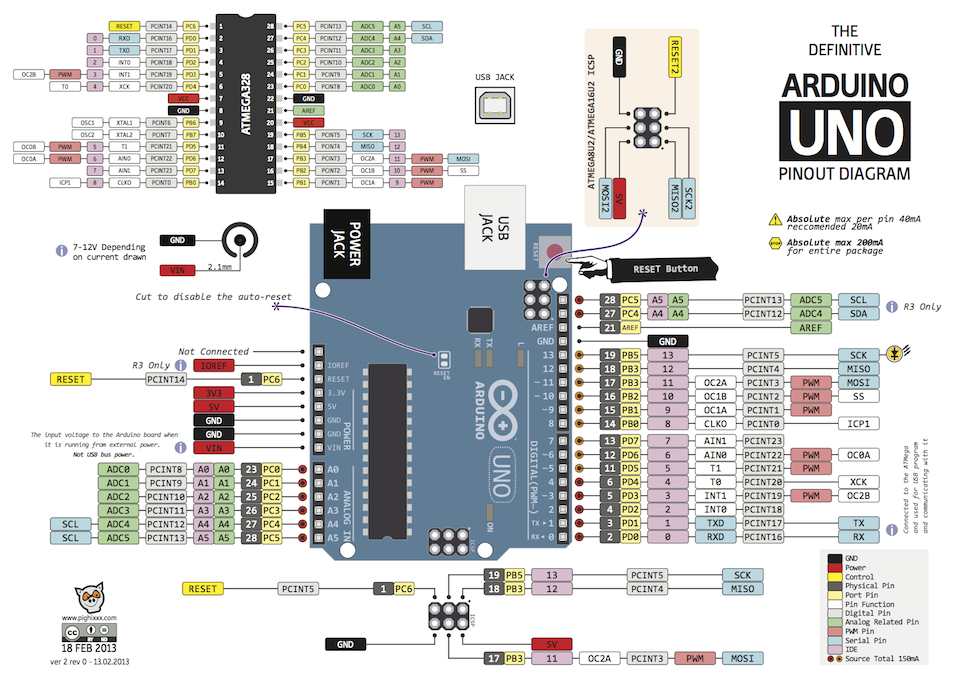
Low level C programming for Arduino Uno without Arduino Genuino IDE
The beauty of C language is that it can go deeper at the hardware level, so you can optimise your hardware use and do more advance stuff with it. The easiest way to learn low level programming on the Arduino is to switch off your Arduino IDE and jump straight…
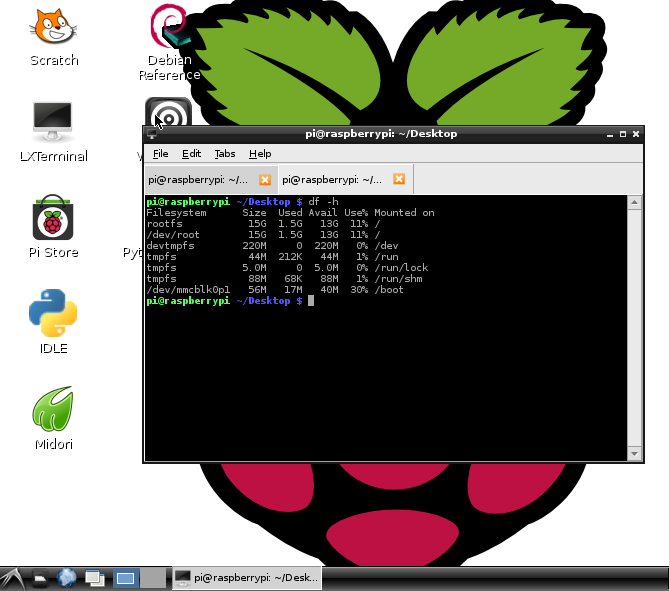
Clone and backup your Raspberry SD Cards with dd command
One of the most useful tools in Linux world, especially when you spent zillion hours configuring that perfect setup on your Pi and you don’t want to lose it, is DDTool. This OS image management tool is not new, but it has become even more relevant since the introduction of…
Back to basic: Code “Hello world” in C with Raspberry Pi 3
So you all got your new and shiny Raspberry Pi 3, and you can’t figure out how to program it. Before you dwell into endless digital jungle, here is the most fundamental way to write your first piece of software, to take you back to a nostalgic era when software…
What do you use your Pi for?
In Melbourne we run our monthly Jam. We would like to know what people from other cities are doing in their Jams. Share your Raspberry Pi projects with the world here: Raspberry Jam Project List Get some suggestion on how to move forward, or simply brag on what you have achieved.
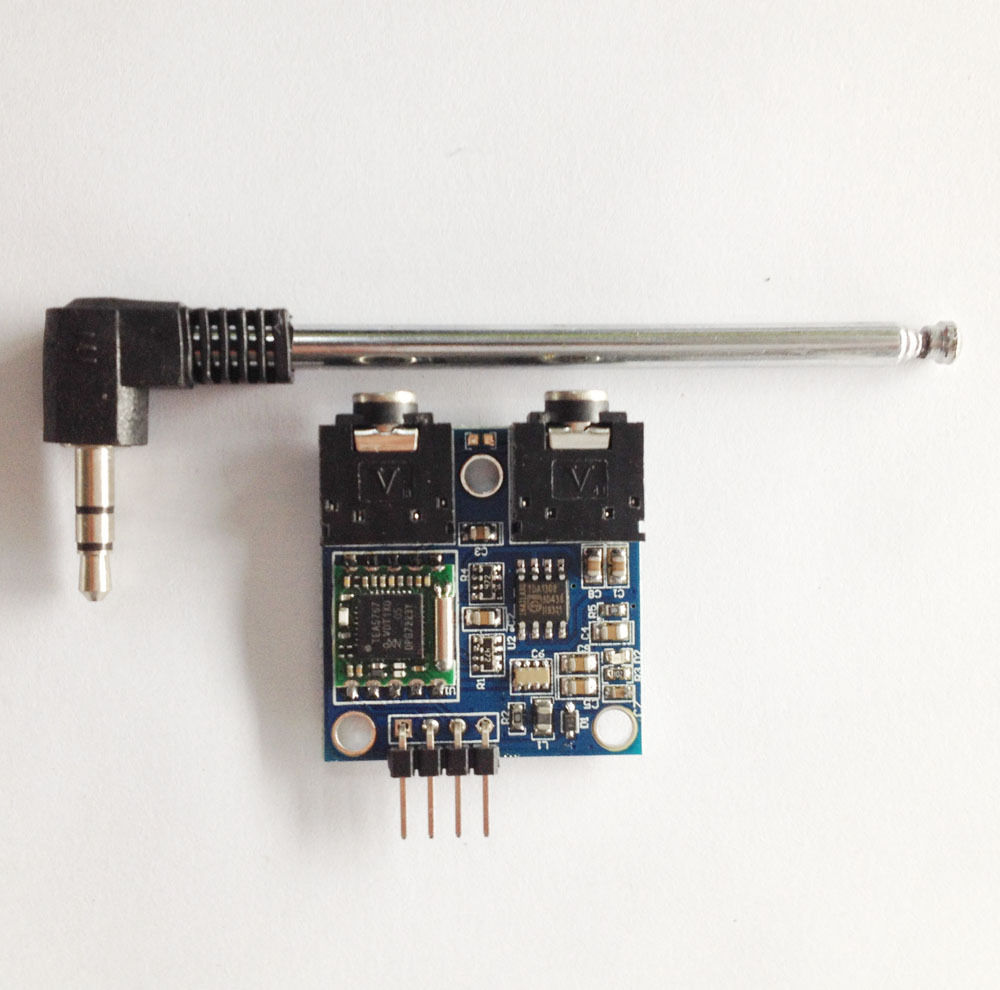
TEA5767 FM radio digital tuner with Raspberry Pi 2 (part 1 of 3)
TEA5767 is an interesting FM radio receiver module that works with micro-controllers like Arduino or Raspberry Pi. Usefull application using this little module could be: Desktop FM radio, Internet FM radio, and voice command transceiver. Some of the modules come with a breakout board which includes antenna socket, stereo out socket…

Raspberry Pi 3 Raspbian hotspot sharing wired Internet connection wirelessly
Want to use Raspberry Pi as hotspot access point? The following tested and verified on Raspbian Jessie. 1. Install dnsmasq and hostapd: sudo apt-get install dnsmasq hostapd 2. Ensure your wlan0 is enabled sudo nano /etc/network/interfaces allow-hotplug wlan0 iface wlan0 inet manual sudo nano /etc/dhcpcd.conf 3. Give your wlan0 static…
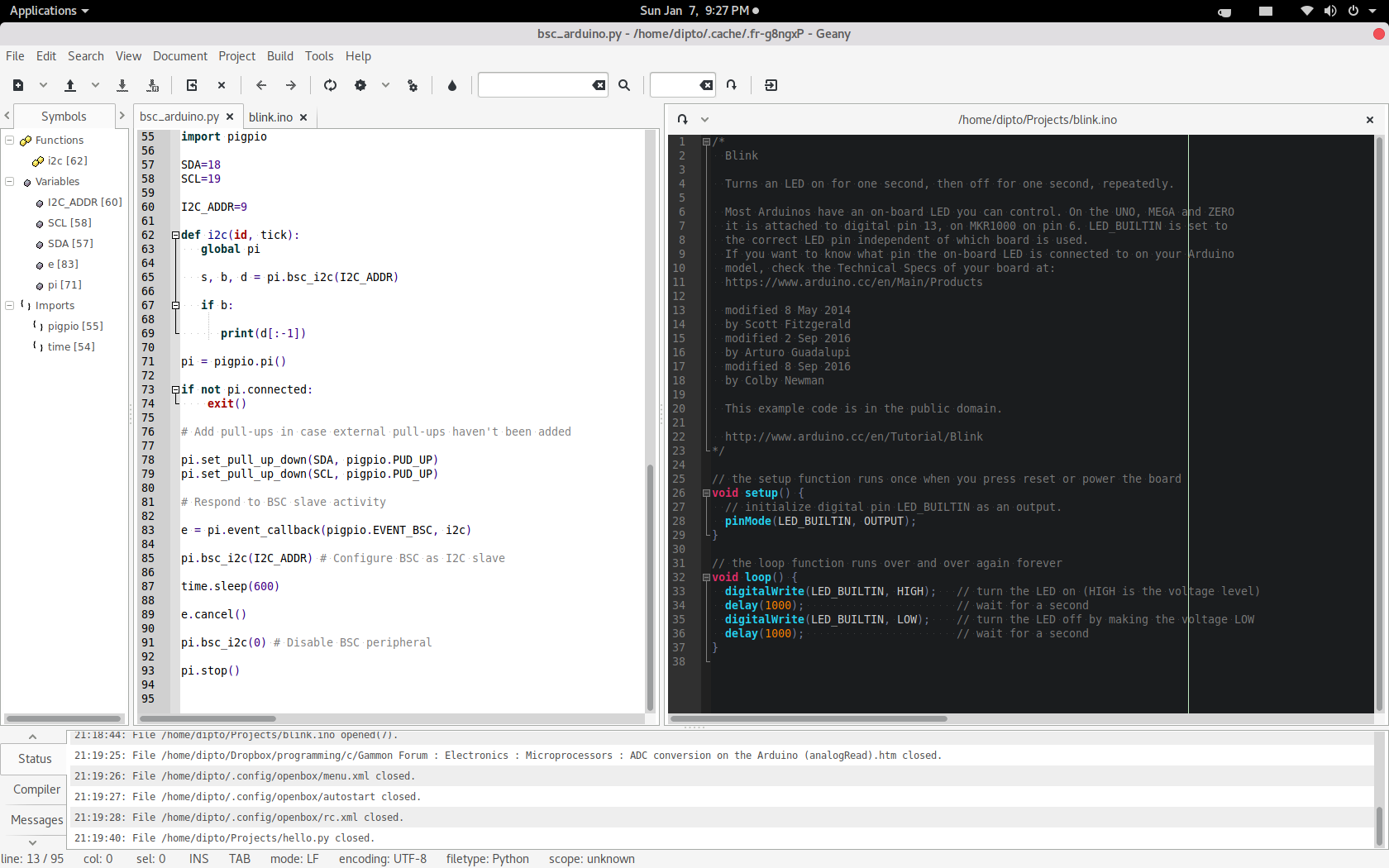
Using Geany as multi-language code editor (IDE) for your Arduino project
When working on an Arduino project, you often need to create more than just one file. This could be combination of C and Python. You have the choice of switching between Python IDE like IDLE or PyCharm and a typical C CLI-based editor vim, and Arduino Genuino IDE to edit…
AVR-GCC programming – Simple Interrupt for blinking LED on Arduino Uno using pure C
Interrupt is powerfull tool because you can harnest the hardware power of Arduino, for instance to blink multiple LEDs simultaneously. Supposed you want to blink a LED using interrupt and not a timer, the following example will toggle PIN13 (PB5) which is liknked to the in-built LED using Timer. …
Low level C programming for Arduino Uno without Arduino Genuino IDE
The beauty of C language is that it can go deeper at the hardware level, so you can optimise your hardware use and do more advance stuff with it. The easiest way to learn low level programming on the Arduino is to switch off your Arduino IDE and jump straight…
Graphics and game programming using C++ and SDL
Prepare the your environment. Install g++ Install sdl Install vim and configure .vimrc for C++ projects Run your first hello world program Display Window Graphics basics Sprite and animation basics Keyboard inputs Mouse inputs Summary
")

